Golang号称云计算时代的C语言,是非常值得研究的一门语言
本文是笔者在初学Golang的时候,学习的一些新的分享。现在开一个系列,Golang究竟怎么回事系列?谈Goroutine,谈数据结构,不仅语言语义理解,还要更深入的,更本质的看到,Golang的数据结构到底是怎么回事?
其中,使用到gdb,dlv等调试工具,有此经验的更佳。(旁白:这也是我更喜欢Golang的原因,可以使用gdb拨开云雾,看到最本质的东西)
Goroutine思考几个问题
-
协程是什么,协程应用场景?
-
协程的调度实现有哪几种样式?有哪些常见的协程实现?
-
实现一个简易协程调度
-
协程上最重要的准则是什么?
-
有了协程要配套哪些东西?
前面有两篇介绍协程的文章:
从简单的讲起,协程是什么?
协程是什么?
协程是什么? 协程就是用户态的最小调度执行单位,类比理解就是用户态线程,本质就是用户态自己切换cpu,在协程这一层我们基本可以把线程和cpu等同起来。(旁白:协程这个执行体操作系统是不认识的,只有用户自己认识,所以你用pstack看线程的工具是看不了协程的)
协程应用场景?
-
IO密集型:IO密集型程序,cpu利用率低,使用协程,可以让用户按照实际情况调度,充分利用cpu,在当前多核cpu的架构中非常重要
-
框架改造:原本项目全是同步调用,cpu利用率低。直接改成异步回调不现实,通过实现协程,达到非侵入式的框架异步改造
-
协程的实现使用会使得全异步框架代码的编写简单,可维护性好
(旁白:协程两个用法:1)框架同步改造异步 2)异步代码写成同步样子)
协程的调度实现一般有哪几种样式?
协程最根本的就两种类型:
-
对称的切换调度方式
-
非对称的切换调度方式
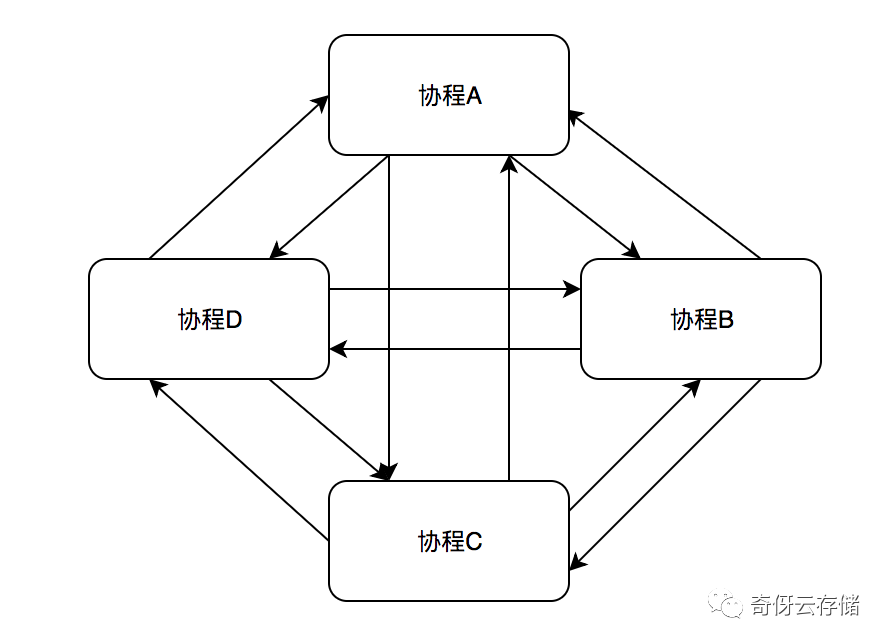
对称的调度方式
每个协程任务都是一样的,不存在主次,都可以相互切换。这类调度类型看着美观,但是实现起来会非常复杂,如果加上一些协程锁,异步io切换逻辑之后,而且极容易出错。不容易实现时序的串行化。
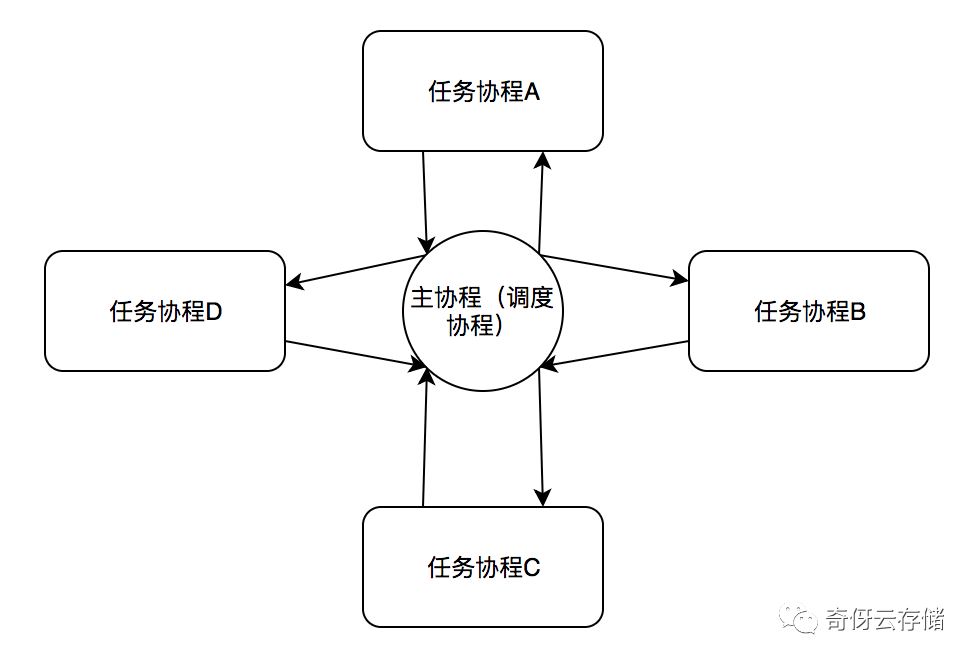
非对称的调度方式
最典型的就是有一个中心调度任务。主要角色分为:
-
主协程:负责所有的协程调度
-
任务协程:执行具体的业务逻辑代码的协程任务
基本原则:
-
严格保证所有的协程切换都必须且只能在 “主协程”<-> “任务协程” 之间进行
-
存在串行逻辑的时候,必须保证严格的串行时序(这个会在协程锁的实现里讲)
有哪些常见的协程实现?
Linux提供了协程库,可以基于以下这四个调用实现协程切换
#include <ucontext.h>
void makecontext(ucontext_t *ucp, void (*func)(), int argc, ...);
int swapcontext(ucontext_t *oucp, const ucontext_t *ucp);
int getcontext(ucontext_t *ucp);
int setcontext(const ucontext_t *ucp);
-
glusterfs
-
qemu,等
或者你可以自己保存,交换寄存器栈环境:
-
libco (C++)
-
greenlet(Python),等
怎么实现一个简易的协程调度?
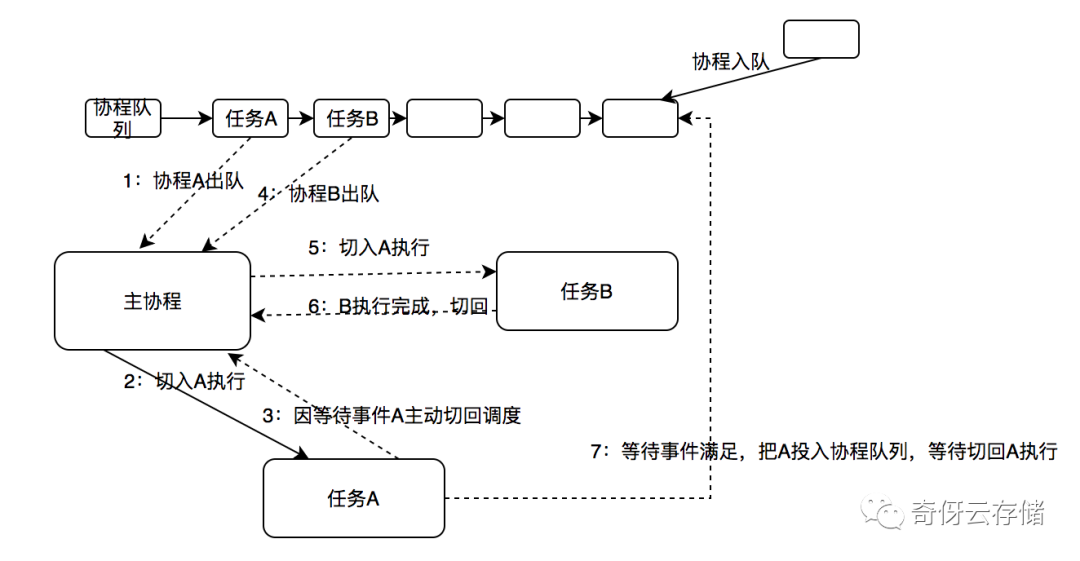
上图是一个比较完整的切换示意图:
-
主协程(调度协程)总是从协程队列中取出协程任务执行
-
协程任务执行过程中,遇到等待事件,需要保存好上下文,设置好唤醒路径之后,切回调度
-
切回调度之后,CPU就让出来了,就可以执行其他的任务,从而实现了并发
-
等待事件到来之后,按照之前设置好的环境路径,把协程任务再次投入到协程队列尾端,等待执行
-
等重新取到协程的时候,主协程切入,从之前切出的地方开始执行
以上就是实现的一个简单的协程调度的原理。当然具体细节会有很多,状态修改,协程生命周期,校验逻辑。比如必须:
-
加入爆栈的校验(支不支持栈的自动扩容)
-
协程的生命周期的校验
-
可能还需要做一些调试工具,比如查看某个协程的协程函数调用栈
-
死锁检查
-
比如,某个协程加了mutex阻塞锁,走到后面代码,就直接切到调度,那么后面一旦有协程任务来加同一把mutex锁,就会导致死锁问题
协程上最重要的准则是什么?
协程任务上一定不能跑阻塞的任务调用。一定要确保cpu不停的转。因为所有的协程当前本质上是不支持抢占任务的,因为没有时间片的概念。一旦阻塞,会导致这个线程执行所有的任务阻塞。
协程要配套哪些东西?
- 协程锁,条件变量,sleep,或者其他一切和阻塞有关的调用。
Goroutine的设计
前面复习完了协程通用的知识,下面终于到了重点戏码——Golang的协程是怎么回事? (旁白:协程实现很简单,就四板斧:任务,队列,切换上下文的手段,代码执行者) G-P-M的数据结构
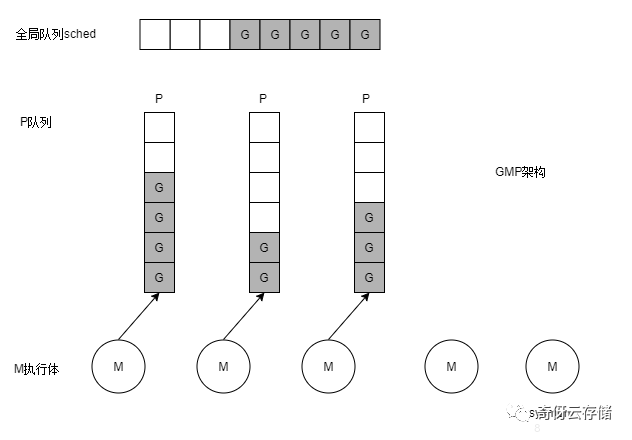
作为Go的最大宣传特点,来看看goroutine的协程实现。goroutine本质上和上面我实现的协程是一样的。但是由于做了一些层次抽象,更具灵活性。
-
G:Goroutine,一个G就是我们协程任务,是调度执行的单位。所以最重要的就是栈结构了(旁白:四板斧之一:任务)
-
M:Machine,这是一个抽象出来的数据结构,可以认为就是执行体,就是线程,就是cpu,每个M都代表一个线程(旁白:四板斧之一:执行者)
-
P:processor。处理器,这个可以认为就是代表一个硬件cpu核心。通常这个数量也就是和cpu核数相同(旁白:四板斧之一:队列,Golang的设计就是得P者得天下,得队列者得天下)
其中启动开始P就是固定的,M是会增长的,M执行任务必须是绑定到一个P(也就是说,一定要有一个队列),没有绑定到P的M就是空闲的,或者游离态的。这样数据结构(P)和执行(M)分离增加了扩展性。
举两个例子:
-
如果M被阻塞,这个时候,队列里面所有的G都是要移交出去的,之前会存在比较复杂的操作。GMP架构,只需要M释放P,空闲的M去接管P就行了。
-
如果当前M执行完了P队列的所有任务,那么也不会空闲等待,而是会尝试去steal其他的G。先尝试从全局队列里获取,没有获取到,那么再去随机挑选一个P队列,拿走部分的G。(worke-steal)
这个GMP的设计是在Go1.1之后加入的:https://docs.google.com/document/d/1TTj4T2JO42uD5ID9e89oa0sLKhJYD0Y_kqxDv3I3XMw/edit#heading=h.mmq8lm48qfcw
提一下:go里面实现一些并发同步操作的时候,很多都是使用原子操作来替代锁,从而减少消耗,这个值得我们学习。
有些特殊的M,比如sysmon是不绑定P的。这个用于监控一些阻塞的异常情况,比如一个M长时间阻塞超过10ms,那么强制把M-P解绑,把M游离出去,P绑定到一个空闲的M上,继续执行队列里的G任务。
Go程序启动
// The bootstrap sequence is:
//
// call osinit
// call schedinit
// make & queue new G
// call runtime·mstart
//
// The new G calls runtime·main.
-
做一些初始化的操作
-
创建出一个goroutine结构 runtime.main 函数
-
执行runtime.mstart 函数
-
汇编引导结束,之后就由golang的函数main入口运行
初始化的时候,会创建几个线程(M)
-
sysmon特殊线程
-
垃圾回收的线程
(旁白:goroutine有runtime的运行逻辑)
Goroutine调度
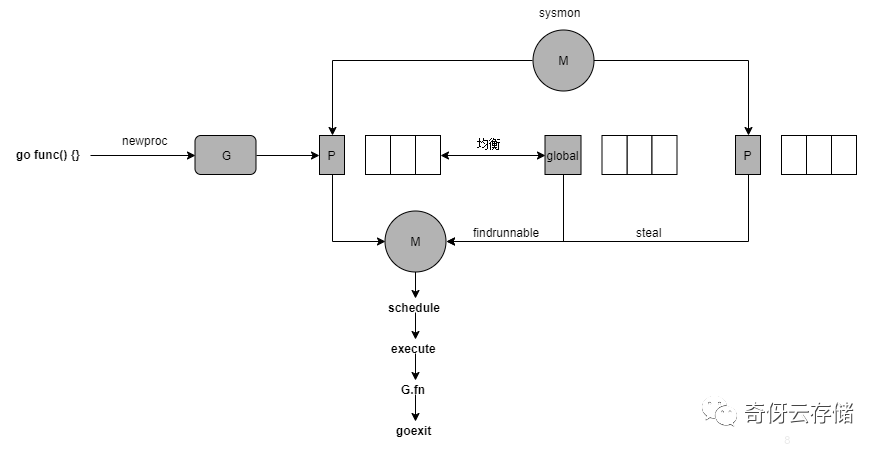
创建goroutine
接口
newproc
goroutine的调度跟之前我实现的协程调度核心是一致的,但是由于是多了一个抽象层(GPM),灵活性和扩展性大大提高。
-
go语言里面go关键字用于创建goroutine(协程),实际调用的是newproc函数
-
newproc创建出一个goroutine结构体:G,分配2kb的协程栈(在systemstack环境下调用)
-
然后把G加入P队列中,等待执行
-
切回原来的goroutine执行指令
步骤一:用来创建goroutine的结构
type funcval struct {
fn uintptr
// variable-size, fn-specific data here
}
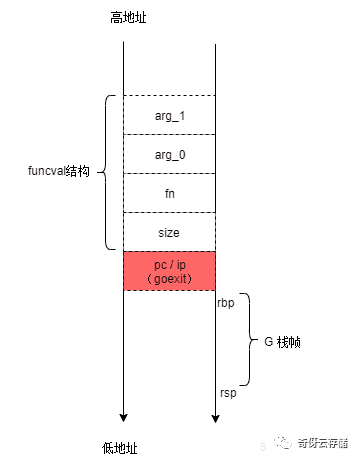
注意:特意标红的地方,这里是goroutine调度的一个关键。在goroutine执行完fn函数之后,在执行ret汇编指令的时候,会把这个地址取出来放到指令计数器(pc)去执行,而这个地址恰好是goexit的地址。这个赋值就是在newproc的时候赋值的。执行了goexit,你才能切回调度里(非对称中心化调度)。
newproc -> newproc1 -> gostartcallfn
步骤二: newproc是在systemstack的包装下调用的,这个调用保证newproc的函数执行是在调度协程的栈里面(M.g0栈)
// func systemstack(fn func())
TEXT runtime·systemstack(SB), NOSPLIT, $0-8
...
// 切换到调度: switch to g0
MOVQ DX, g(CX)
MOVQ (g_sched+gobuf_sp)(DX), BX
SUBQ $8, BX
MOVQ $runtime·mstart(SB), DX
MOVQ DX, 0(BX)
MOVQ BX, SP
// 执行函数:call target function
MOVQ DI, DX
MOVQ 0(DI), DI
CALL DI
// 切回原来的协程:switch back to g
MOVQ g(CX), AX
MOVQ g_m(AX), BX
MOVQ m_curg(BX), AX
MOVQ AX, g(CX)
MOVQ (g_sched+gobuf_sp)(AX), SP
MOVQ $0, (g_sched+gobuf_sp)(AX)
这个就符合中心调度的设计思想。解释几个函数调用
runqget // goroutine 出队
runqput // goroutine 入队
runqgrab // goroutine 抢占
G入队的几个优先级:
-
runqput
-
p.runqnext (第一优先级)
-
p.(runqhead, runqtail) 双端队列
-
runqputslow
-
sched.runq 全局队列 (p队列满了就会溢出到全局队列,p队列256个槽位)
newproc -> newproc1 -> systemstack ( runqput )
步骤三:执行goroutine
调度接口入口
schedule
流程就是:
-
从队列里获取到G
-
从P队列里获取G任务
-
第二优先级从其他地方获取
-
切入执行
这里提到一点细节就是:go的调度机制是,当执行了n(61)个任务之后,必须要去全局列表获取G任务,保证公平执行。
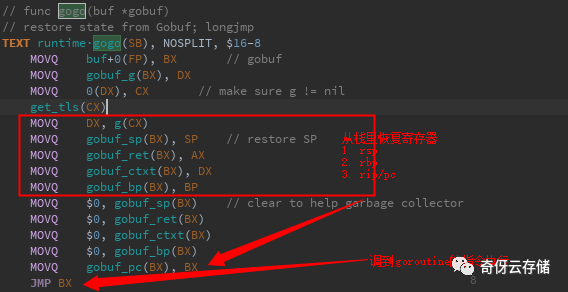
具体切入执行某个G
execute -> gogo
其中gogo的代码
goroutine的抢占调度
goroutine本质上是没有抢占式的调用,只是会在goroutine结构体上加上一个标记。因为没有时间片。只有当有机会调用到特定的调用的时候,才可能发生切出。
goroutine的自动扩容
-
编译器分析判断是否可能会导致2kb的栈溢出,如果可能,那么就会在函数的汇编代码前后加上指令代码
-
前面——判断是否栈溢出
-
后——栈扩容调用morestack
(旁白:自动扩容的触发机制也被复用在抢占调度了)
goroutine的主动切出
-
Gosched : 把当前G放入到队列中,然后切出
-
gopark/goparkunlock : 保存上下文,直接切出
-
goready : 唤醒G(把G重新入队)
坚持思考,方向比努力更重要。
关注我:奇伢云存储
